基于Arduino平台的多功能智能小车的设计 |
您所在的位置:网站首页 › arduino 检测电量 › 基于Arduino平台的多功能智能小车的设计 |
基于Arduino平台的多功能智能小车的设计
|
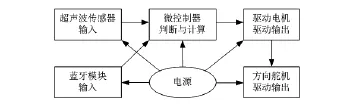
南京信息职业技术学院 徐开军 刘飞龙 基于Arduino平台的多功能智能小车的设计 南京信息职业技术学院 徐开军 刘飞龙 在众多智能化机器人项目中,智能小车可以称得上是一项最早走出实验室的实用发明。本文设计的多功能智能小车,以Arduino这款便捷灵活、容易上手的开源平台作为主控单元,小车驱动由L293D驱动电路完成,速度由单片机输出的PWM波控制。其中,以手机蓝牙作为客户端,以Arduino HC-06蓝牙模块作为接受端,实现对小车前进、后退、左转、右转、停止的操作;以HC-SR04超声波传感器通过发送检测与障碍物的距离,结合对SG90舵机的控制进行转向,从而实现自动避障的功能。 Arduino;智能小车;蓝牙遥控;超声波避障 1 引言随着现代科学技术的快速发展,智能机器人技术已广泛应用于人类社会的各个领域。为了提高社会的生产水平和人们生活质量,常常让智能机器人替人们做一些人类做不了或做不好的工作。在当今的生产制造、物流仓储、轨道交通、工程机械、医疗手术等诸多行业,智能机器人已经无所不在。从生产制造业的无人搬运车,到特种行业的灾难救援、拆弹机器人,再到军事领域的防御和侦察机器人以及航天领域的星球表面探测器,处处可以见到智能小车的身影。通过各类传感器件来采集相关的信息,送入主控单元 Arduino 单片机处理数据后完成相应动作,以达到自身控制。电机驱动电路采用H桥驱动模块驱动2个直流电机;蓝牙遥控采用手机蓝牙用户界面和HC-06蓝牙模块完成,测距与避障采用HC-SR04超声波模块和舵机模块完成,最后由控制单元处理数据后通过编程,并有序合理的将各模块信号整合在一起并完成相应动作,实现了智能控制,相当于简易机器人。 2 系统设计方案2.1 平台选择 同其他系统相比,Arduino在很多方面更具优越性,成本低,跨平台,简易的编程环境,软硬件开源并且可以扩展,尤其适合教学和业余爱好者们使用。因为Arduino UNO R3是Arduino USB接口系列的最新版本,是Arduino平台的参考标准模板,也是目前使用最多的版本。它不仅十分稳定而且还能满足本设计中智能小车功能的完美实现,因此选择Arduino UNO R3作为智能小车的控制单元。要完成本设计所要求的智能机器小车,还要满足蓝牙遥控和超声波避障的功能,起码要有两件必备之物——微控制器和传感器,这样智能小车才有自己的大脑和感官。 2.2 系统功能设计 本设计主要是制作一款能够进行智能判断并能做出正确反应的智能小车,小车具有手机蓝牙遥控、自动避障的功能。本设计以两个直流电动机为主驱动,通过各类传感器件来采集相关信息,并送入主控制单元Arduino单片机处理数据后完成相应的动作,以达到自身控制。电机驱动电路采用H桥驱动模块,驱动2个直流电机;蓝牙遥控采用蓝牙传感器完成;测距、避障用超声波传感器完成,最后由控制单元处理数据后通过编程,有序合理的将模块信号整合在一起并完成相应动作,实现智能控制,相当于简易机器人。
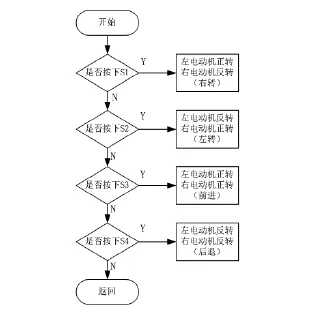
图1 系统功能模块图 2.3 电源的选择 对于一辆智能机器小车来说,电池就是它的动力源。如果使用太阳能电池,无法使智能小车在室内运行,而且现在的太阳能电池板的能效不高,要达到理想的状态必须有很大的面积。最后考虑到方便和可持续性,本设计采用可充电的铅酸电池。 2.4 电机的选择 电机是智能小车的驱动装置,选择一个适合的电机会使制作更顺利,机器性能更好。能用于智能机器小车的电机种类很多,而制作智能小车会选用直流电机、减速电机以及步进电机,考虑到价格、功率、尺寸、转速等因素,本设计采用直流电机。 3 蓝牙遥控设计3.1 设计方案 本设计是以Arduino单片机为核心,通过‘Arduino Car Control’手机控制界面,进行简单的前进、后退、左转、右转、停止等功能操作,控制小车进行不同的运动。Arduino模块通过控制电机驱动,从而控制电机的正反转,使小车做出相应的动作。通过手机蓝牙与蓝牙接收模块HC-06进行配对之后,先通过一个测试程序测试‘Arduino Car Control’各个按键所对应的数字代码,(经过测试程序测试出各按键代码为:前进102,停止115,左转108,右转114,后退98)以便编写主程序。编写并下载程序以后,便可以接收到从手机端传输过来的动作指令。接收到指令之后,蓝牙模块会传递给Arduino单片机,再通过微处理器分析辨别传输过来的指令,使程序跳转到不同的子程序,产生不同的响应,从而控制电机驱动,实现小车的前进、后退、左转、右转、停止等功能。 3.2 程序流程图
图2 蓝牙遥控模块程序流程图
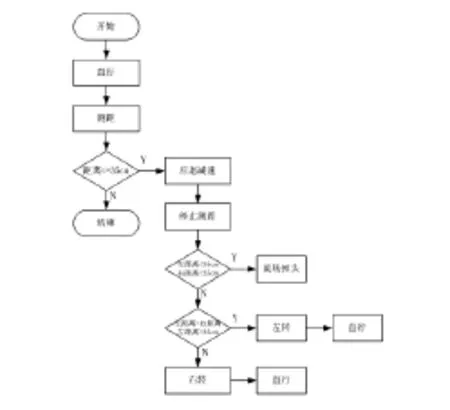
图3 超声波避障模块程序流程图 4 超声波避障设计4.1 设计方案 超声波避障由接收机或者单片机发出控制信号给舵机模块,将获得的直流偏置电压与电位器的电压进行比较,获得电压差输出。经由电路板上的IC判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回信号,判断是否已经定位。 避障小车在行进过程中,超声波传感器不断检测小车行进方向是否有障碍物,当超声波传感器检测到有障碍物时,小车先后退减速至停止。然后测距并判断左右距离是否符合程序里所设定的值,哪边比较宽阔,就转向那边。如果左右都有障碍物,则后退掉头。 4.2 程序流程图(见图3) 5 结束语本文设计了一种基于Arduino平台的智能小车,实现了手机蓝牙遥控和超声波避障的功能。试验结果表明,以蓝牙手机作为客户端,智能小车上的蓝牙模块作为服务端,通过串口仿真协议进行通信。它具有编程灵活、自由、易于控制、稳定性能好、扩展容易等优点。实现了小车的前行、后退、左转、右转和停止等功能,将手机变身为遥控器,为人们的生活带来无限方便。以超声波传感器作为测距避障模块更可靠,能够精确的测距,结合舵机后能够全自动行驶,达到了理想中的效果。 [1]戴凤智,海玉.Arduino轻松入门[M].北京:化学工业出版社,2014. [2]黄文凯,伍冯洁.Arduino开发实战指南[M].北京:机械工业出版社,2014. [3]戈惠梅,徐晓慧,顾志华,等.基于Arduino的智能小车避障系统的设计[J].现代电子技术,2014,11. [4]聂茹,严明.基于Arduino开发板的智能小车设计[J].微处理机,2015,04. [5]顾志华,戈惠梅,徐晓慧,等.基于多传感器的智能小车避障系统设计[J].南京师范大学学报(工程技术版),2014,01. [6]赵津,朱三超.基于Arduino单片机的智能避障小车设计[J].自动化与仪表,2013,05. 项目资助:南京信息职业技术学院青蓝工程骨干教师项目、江苏省政府留学奖学金资助项目。 猜你喜欢 蓝牙小车超声波 蓝牙音箱的直线之美工业设计(2022年7期)2022-08-12大车拉小车快乐语文(2020年36期)2021-01-14自制小车来比赛科学大众(2020年17期)2020-10-27刘老师想开小车文苑(2018年22期)2018-11-19简单、易用,可玩性强Q AcousticsBT3蓝牙音箱家庭影院技术(2018年10期)2018-11-02蝙蝠的超声波小天使·六年级语数英综合(2018年10期)2018-10-15基于Niosll高精度超声波流量计的研究电子制作(2018年17期)2018-09-28两轮自平衡小车的设计与实现电子制作(2018年8期)2018-06-26适合自己的才是最好的 德生(TECSUN) BT-50蓝牙耳机放大器家庭影院技术(2018年3期)2018-05-09紧急:蓝牙指尖陀螺自燃!安全隐患频出玩具世界(2017年8期)2017-02-06
|
 电子世界2016年24期
电子世界2016年24期【本文地址】